





-
 QQ空间
QQ空间
-
 QQ好友
QQ好友
-
 微信好友
微信好友
-
 新浪微博
新浪微博
杠杆
历史
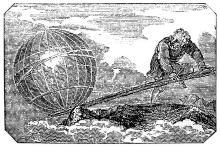
1824年,在伦敦发行的《机械杂志》内的一副刻画。阿基米德说:“给我一个支点,我就可以撬起整个地球。”
早在旧石器时代晚期,古人就知道使用杠杆的原理来制作投枪器。 考古学者认为,在古埃及4500多年前的金字塔时期,工人使用杠杆来移动、抬举重量超过100英吨的方尖碑。 中国战国时期,墨子在所著作的《墨子》一书中,提到应用杠杆的概念。
大约在公元前330年,亚里斯多德在著作《机械问题》(《Mechanical Problems》)里,对于杠杆有详细的论述,并且基本而言使用虚功的现代概念推导出杠杆原理。 公元前3世纪,古希腊科学家阿基米德在著作《 论平面图形的平衡 》里用几何方法推导出杠杆原理, 并且宣称:“给我一个支点,我就可以撬动整个地球。”
概述
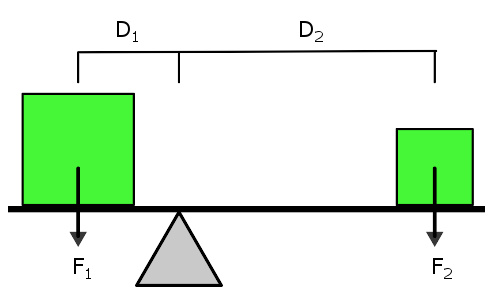
静力平衡的杠杆。
由于杠杆内部有一点为固定点,杠杆只能绕着这固定点做旋转运动。相对于这一点,杠杆不能做平移运动。
杠杆内部的固定点称为“支点”。
使杠杆旋转的力 F 1 {\displaystyle F_{1}} 叫做“动力”,是输入力。
动力作用于杠杆的位置叫做“动力点”。
阻碍杠杆旋转的力 F 2 {\displaystyle F_{2}} 叫做“阻力”,是输出力。
阻力作用于杠杆的位置叫做“阻力点”。
从支点到动力作用线的垂直距离 D 1 {\displaystyle D_{1}} 叫做“动力臂”。
从支点到阻力作用线的垂直距离 D 2 {\displaystyle D_{2}} 叫做“阻力臂”。
理想杠杆不会耗散或储存能量,也就是说,支点与硬棒之间不会出现任何摩擦损耗,硬棒是一种刚体,不会被弯曲,发生形变。注意到硬棒不一定是直棒。弯曲的硬棒形成的杠杆称为“曲杠杆”。对于理想杠杆案例,输入杠杆的功率等于杠杆输出的功率。输出力与输入力之间的比率,等于这两个作用力分别与支点之间垂直距离的反比率,称这相等式为“杠杆原理”,以方程表达:
或者,
定义力矩 M {\displaystyle M} 为
其中, F {\displaystyle F} 是作用力, D {\displaystyle D} 是作用力与支点之间的垂直距离。
则输入力矩等于输出力矩:
杠杆原理表明,当静力平衡时,动力乘以动力臂等于阻力乘以阻力臂:
杠杆的分类
靠着比较动力臂、阻力臂的长度,可以将杠杆分为三类:
动力臂长于阻力臂的杠杆是“省力杠杆”,这可以省力。开瓶器、撬棍等均为省力杠杆。
阻力臂长于动力臂的是“费力杠杆”,这可以费力。大部分剪刀、镊子、筷子、钓鱼竿、火钳、笔等均为费力杠杆。
动力臂和阻力臂长度相等的杠杆是“等臂杠杆”,跷跷板、天平等均为等臂杠杆。
另外一种分类法式依照动力点、阻力点、支点在杠杆的相对位置来分类。
第一类杠杆

第一类杠杆的动力点、阻力点分别在支点的两边。例如,铁撬、剪刀、跷跷板、天平、老虎钳。
第二类杠杆

第二类杠杆的动力点、支点分别在阻力点的两边。例如,独轮车、胡桃夹子。这是一种省力杠杆,可以施加较小的力量来移动较重的物体,但是动力的位移较长。
第三类杠杆

第三类杠杆的阻力点、支点分别在动力点的两边。例如,镊子、扫把。这是一种费力杠杆,可以节省动力的位移。
杠杆原理
杠杆是可以绕着支点旋转的硬棒。当外力作用于杠杆内部任意位置时,杠杆的响应是其操作机制;假若外力的作用点是支点,则杠杆不会出现任何响应。
假设杠杆不会耗散或储存能量,则杠杆的输入功率必等于输出功率。当杠杆绕着支点呈匀角速度旋转运动时,离支点越远,则移动速度越快,离支点越近,则移动速度越慢,由于功率等于作用力乘以速度,离支点越远,则作用力越小,离支点越近,则作用力越大。
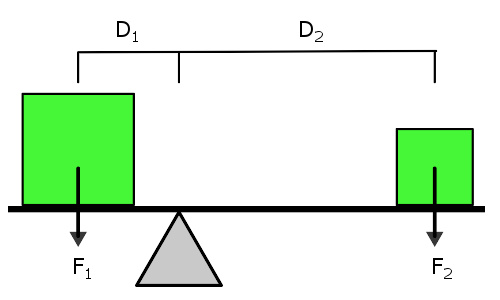
静力平衡的杠杆。
机械利益是阻力与动力之间的比率,或输出力与输入力之间的比率。假设动力臂 D 1 {\displaystyle D_{1}} 、阻力臂 D 2 {\displaystyle D_{2}} 分别为动力点、阻力点与支点之间的距离,动力 F 1 {\displaystyle F_{1}} 、阻力 F 2 {\displaystyle F_{2}} 分别作用于动力点、阻力点。则机械利益 M A {\displaystyle MA} 为
通常在学习杠杆的初级理论时,会聚焦于输入力和输出力由于虚位移而做的虚功。虚位移可以定义为物体的移动速度乘以虚时间。这样定义导致计算的物理量是功率,而不是功。这种方法有一个实在优点:在研究机械工程学或机构学时,功率是主要计算的物理量。使用这种方法来对杠杆做静力分析,就如同对于车子的传动系统,或机械手臂做静力分析,它们的机械利益的计算方式完全一样。
复式杠杆

指甲剪是一种常用的复式杠杆。
复式杠杆( compound lever )是一组耦合在一起的杠杆,前一个杠杆的阻力会紧接地成为后一个杠杆的动力。几乎所有的磅秤都会应用到某种复式杠杆机制。其它常见例子包括指甲剪、钢琴键盘。1743年,英国伯明翰发明家 约翰·外艾特 在设计计重秤时,贡献出复式杠杆的点子。他设计的计重秤一共使用了四个杠杆来传输负载。
参阅
连杆组
机构学
单摆
免责声明:以上内容版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。感谢每一位辛勤著写的作者,感谢每一位的分享。




- 有价值
- 一般般
- 没价值








24小时热门






推荐阅读

关于我们

APP下载



{{item.time}} {{item.replyListShow ? '收起' : '展开'}}评论 {{curReplyId == item.id ? '取消回复' : '回复'}}